The Propeller Development Stick (PDS or Prop Dev Stick for short) is a simple development board for the Parallax Propeller Microcontroller. I already had an older design but I wanted to expand the usefulness of the platform. The Redux version throws out the old version completely and starts over from scratch.
The new PDS features a ADC and a micro SD card slot for storage. Also the speed of the Propeller gets a 16MHz speed bump (from 80MHz to 96Mhz) with the addition of a 6Mhz crystal. Form factor is improved by slimming down the design which enables it to fit on a breadboard. The old USB male plug is gone and it now uses a standard micro USB. This way the user can embedded the device and still program or pull data off of it.
It fully complies with the USB standard. The device uses the FT230X USB to Serial chip and waits to turn on the power buss in till the PC gives the device permission to pull power. This is done by a p-channel mosfet. To switch from USB power to external power (like a battery) a power mux is used. The mux has built in current limiting which is set to 500mA.

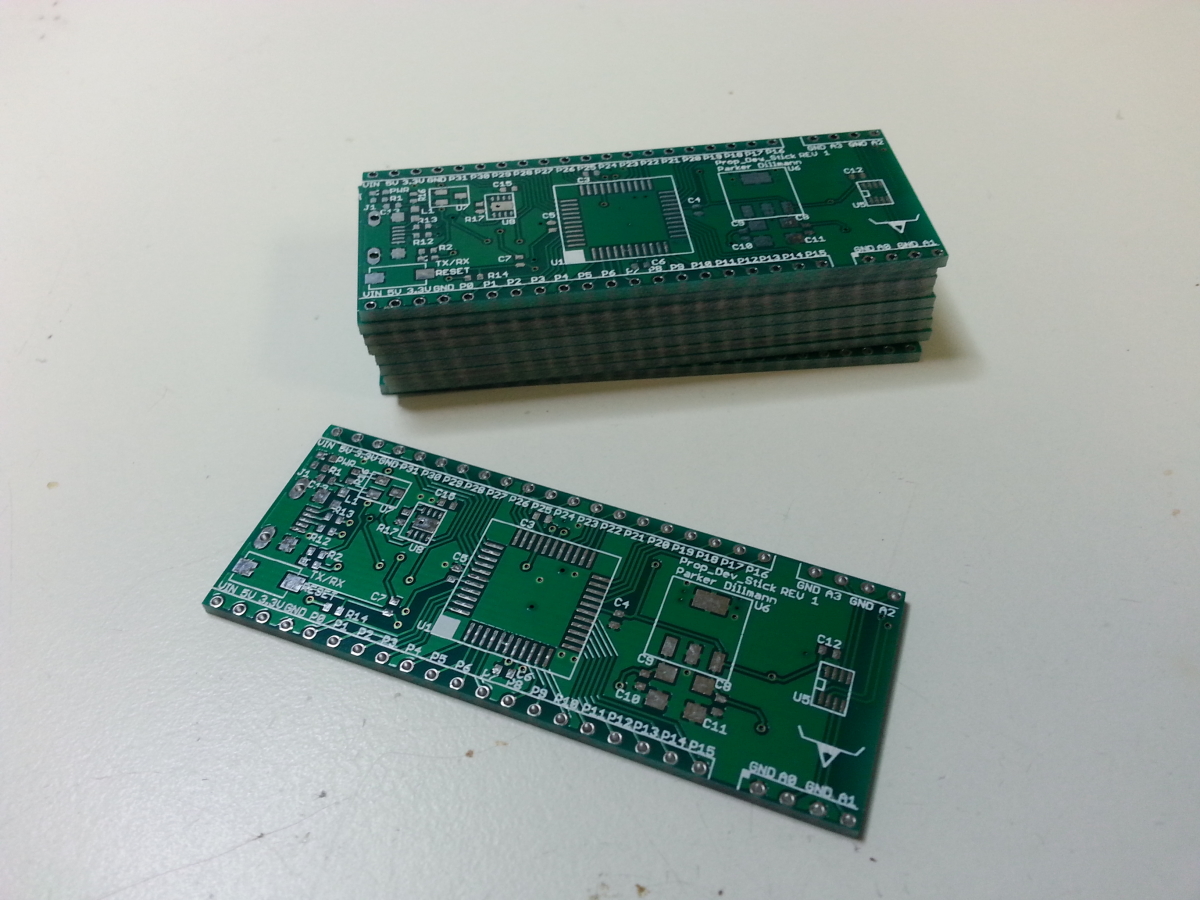
Last night I soldered the new REV 1 board. Everything is working correctly and the footprints/silkscreen are also correct. Will be working on the page documenting the progress of the PDS. Will also upload the design files.

Progression from the first PDS on the left to the newest one on the right. Slightly longer but slightly thinner now. Changed the USB port to a micro usb port. Added an ADC and mirco SD card slot.
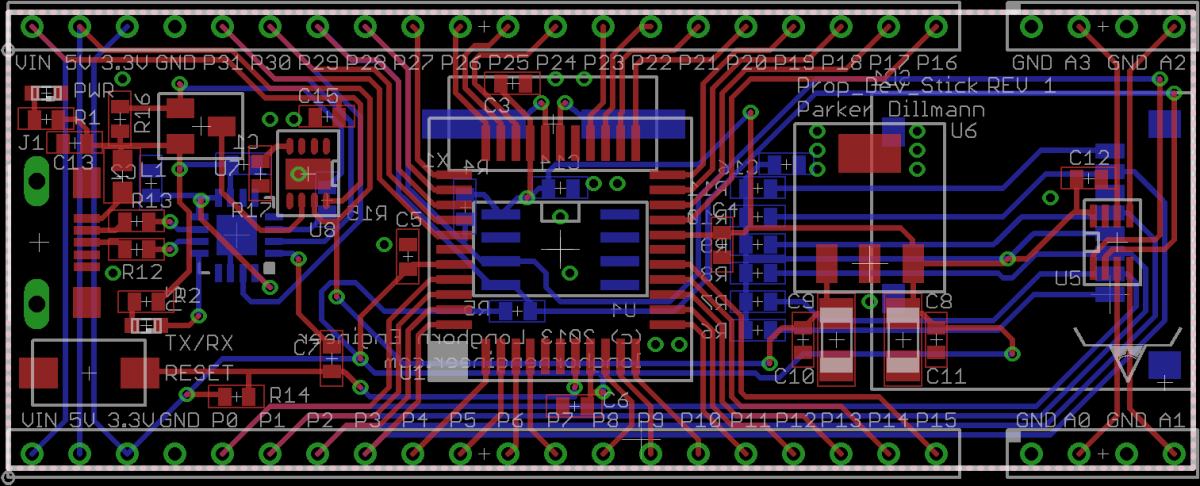
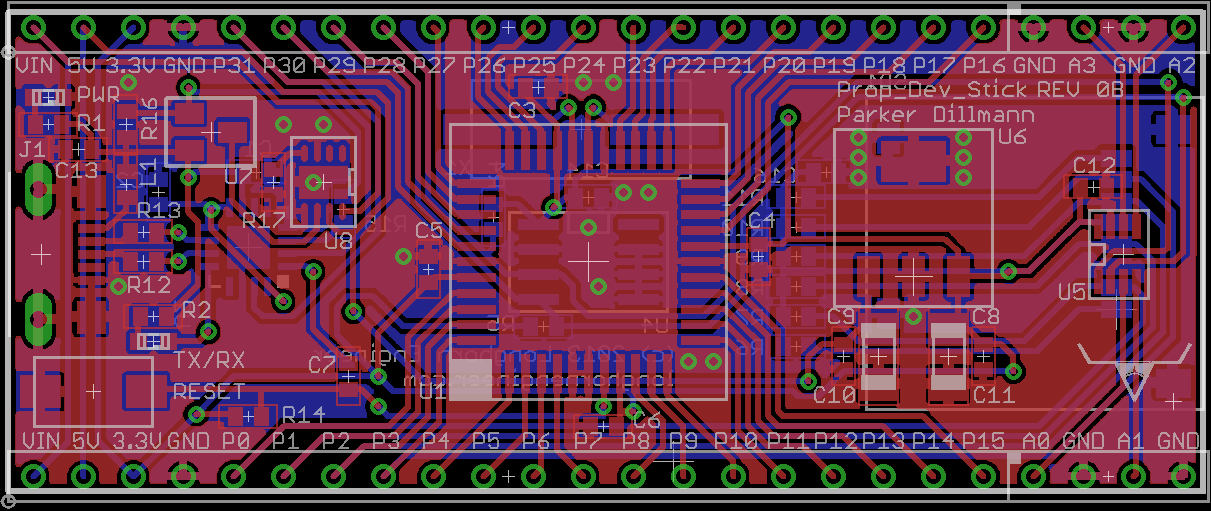
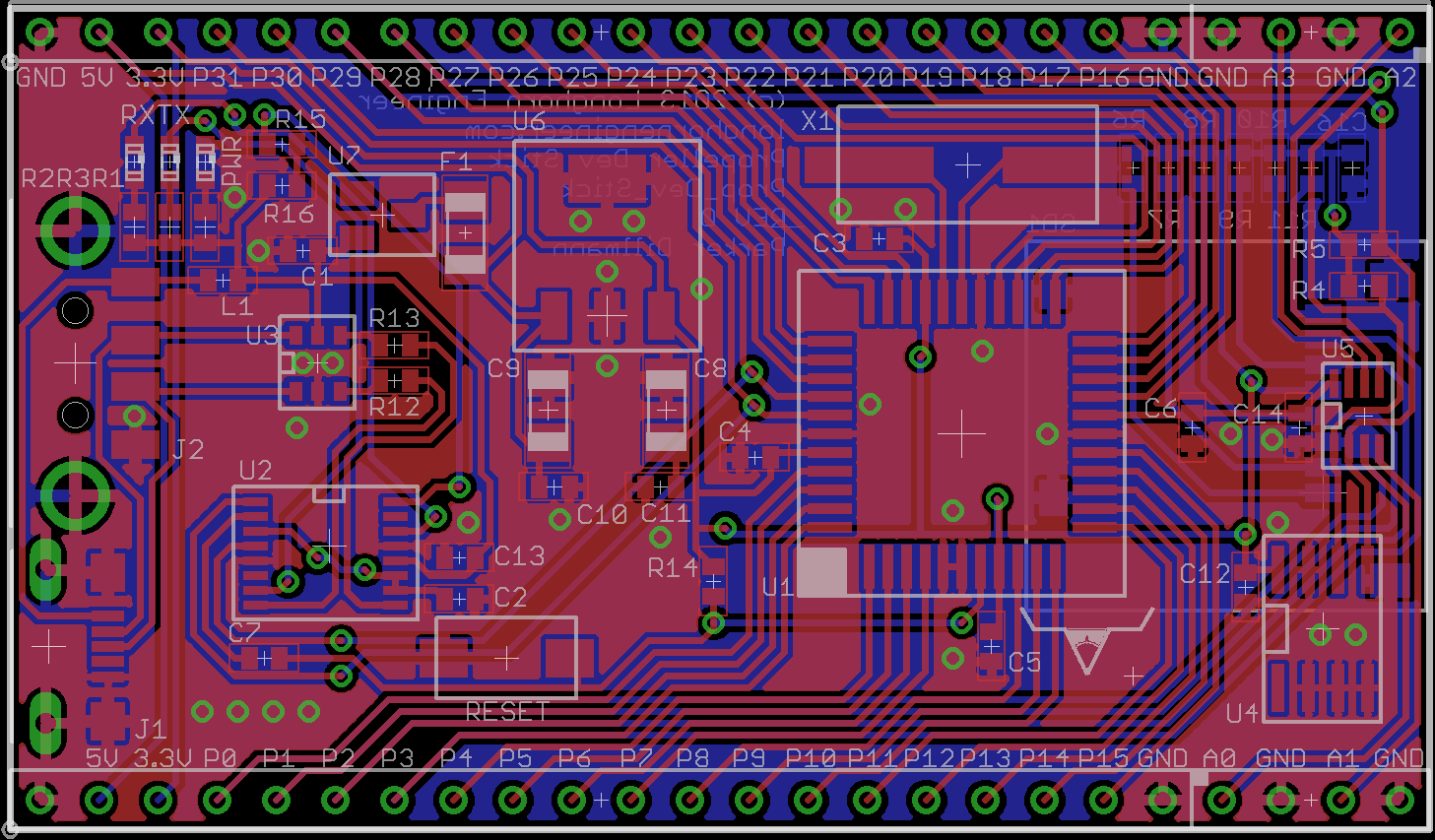
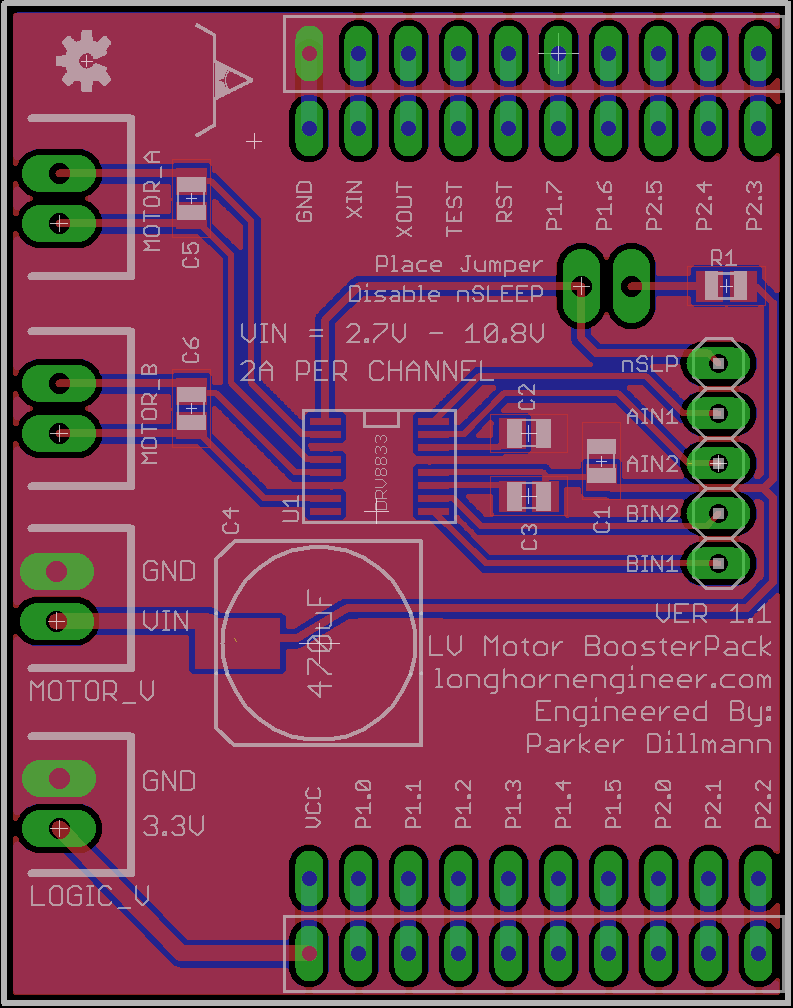
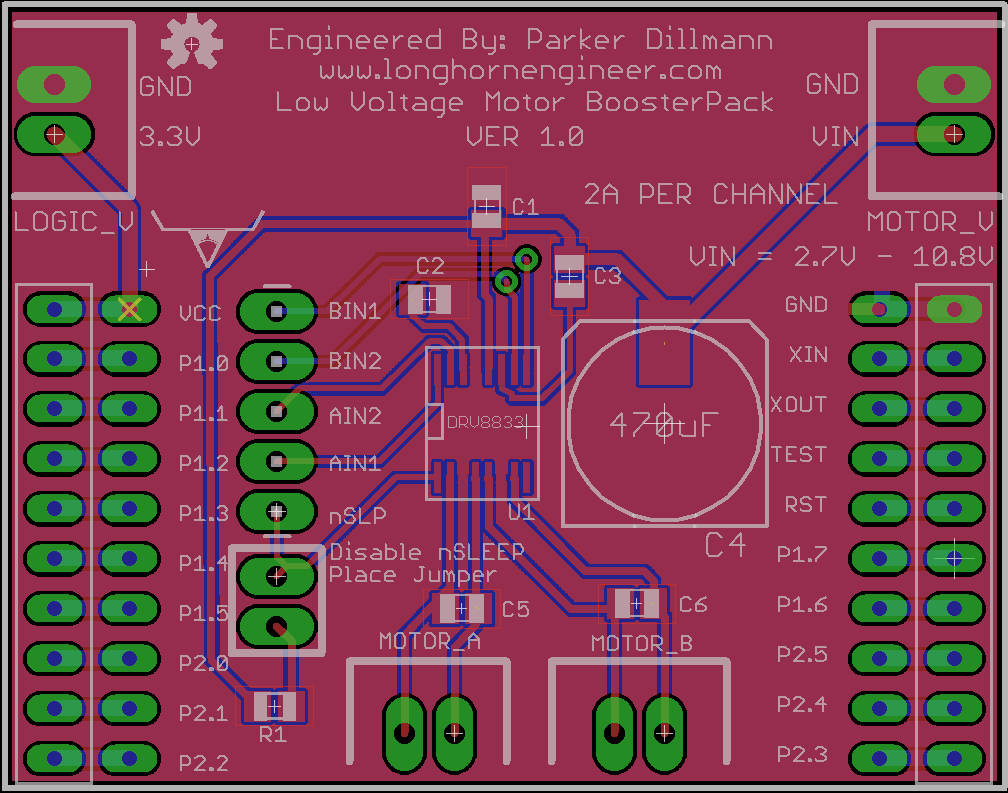
Layout of the PCB.