I designed a 3D printed case for the Super Boost. It has two parts and is designed to hold two cylindrical 18650 lithium cells.
Files (AutoDesk 123D)
Super Boost Case Ver1.0
Super Boost Case Part_A Ver1.0
Super Boost Case Part_B Ver1.0


I designed a 3D printed case for the Super Boost. It has two parts and is designed to hold two cylindrical 18650 lithium cells.
Files (AutoDesk 123D)
Super Boost Case Ver1.0
Super Boost Case Part_A Ver1.0
Super Boost Case Part_B Ver1.0
So I just finished building my first Super Boost. It converts 2.2V – 4.5V to a steady 5V source. This is perfect for charging a cell phone or any other device that charges via USB by using 2 AA batteries or a single cell lithium battery.
The project page is here and the DIY page on assembly is here.


Going to solder one together tonight.
So this is meant to be paired with a UART program. This code is not all my own but I could not remember where I found it. I have edited the original quite a bit but the same structure is still there. If someone recognizes it please let me know so I can give credit.
Printf Code (CCS V5)

The case I designed and Chris printed showed up today. This is the prototype case. I had to make some slight tweaks to the design to get it ready for the final version.
You can download the files on the NES Toploader project page and check out the progress of the portable.
This code is currently for the MSP430G2553 on the Ti LaunchPad. The MSP430G2553 has a built in USCI that can be used for UART. Unlike lower end models of the value line you do not have to make a slow software UART. I looked online and did not see any UART libraries that where nice to work with without hacking them apart. I did not see any FIFO implementations at all either. They generally waited on the UART to finish its business before sending more data.
The advantage of the FIFO allows the MSP430 to push that data into the FIFO as fast as it can and let the hardware UART do the rest of the job. This frees up the CPU to do allot more stuff. The only bad thing is that if the FIFO gets full you start loosing data. The code has a global flag to let the main code know that the FIFOs are full.
The Receive (RX) portions of the code also have a global mailbox flag to notify the rest of the code that the UART received something. This would be useful if you need to send commands to a robot or device.
There are 4 different flavors of the code.
1. RX TX
2. RX TX with a FIFO
3. TX only
4. TX only with a FIFO
The code without the FIFOs waits on the UART during the transmission but uses far less memory then the FIFO code. You have to sacrifice speed or memory on this one. The TX only code strips out the RX portions if you just want to have the msp-430 print to a terminal. This is useful for debugging purposes.
If you are going to use this on the MSP-430 LaunchPad then you will need to cross the RX and TX lines. This pdf I found on the internet explains on page 3 (step 6) what I am talking about.

RX TX UART Code (CCS V5)
Project File
main.c
uart.c
uart.h
RX TX UART FIFO Code (CCS V5)
Project File
main.c
uart_fifo.c
uart_fifo.h
TX UART Code (CCS V5)
Project File
main.c
uart_tx.c
uart_tx.h
TX UART FIFO Code (CCS V5)
Project File
main.c
uart_fifo_tx.c
uart_fifo_tx.h
FIFO Code (CCS V5)
Project File
fifo_.c
fifo.h
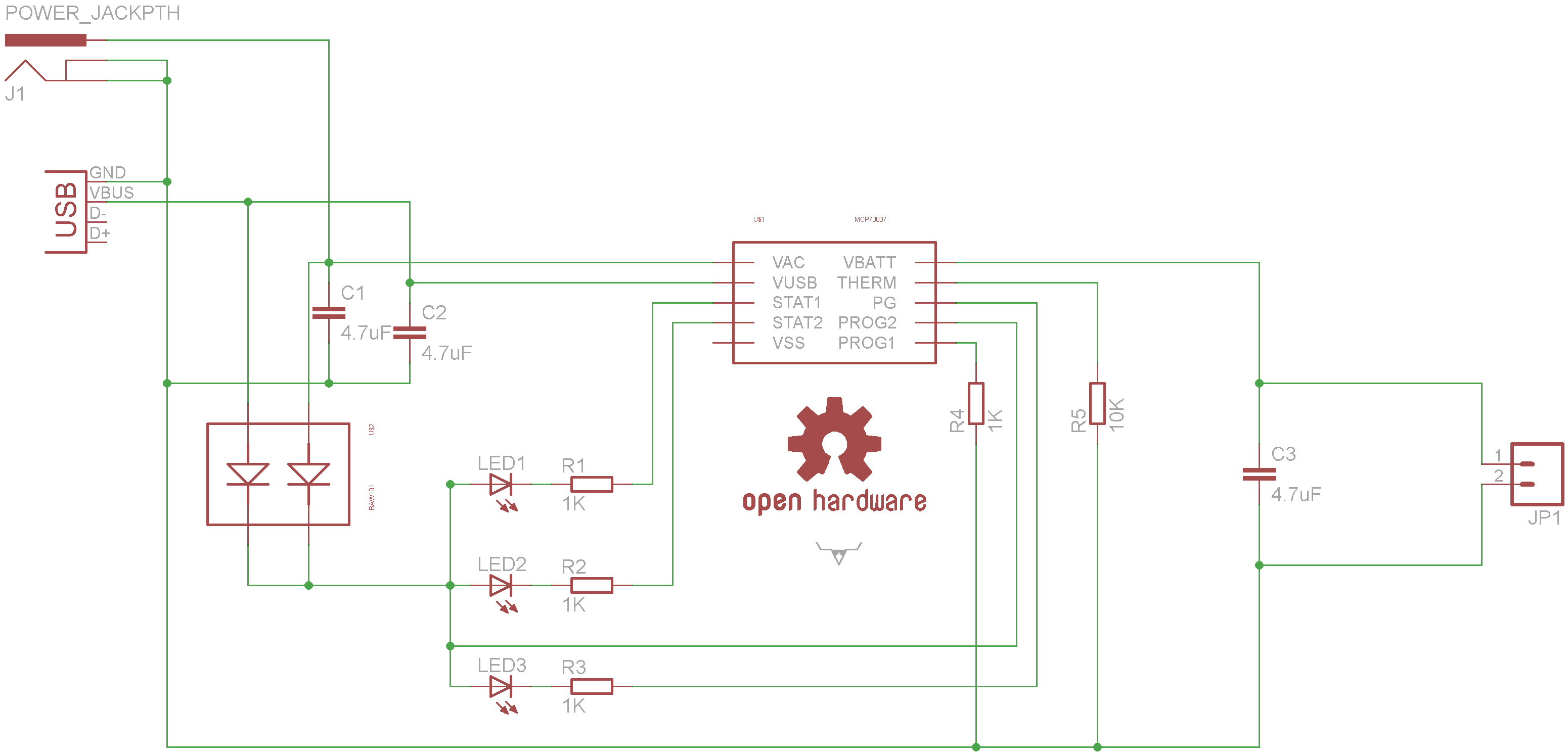
Put together the project page for the Single Cell Lithium Battery Charger Circuit.
This project is open source and all the files and part lists needed to make the board are located on that page.
Already updated the PCB to Ver1.1. Forgot a ground trace.
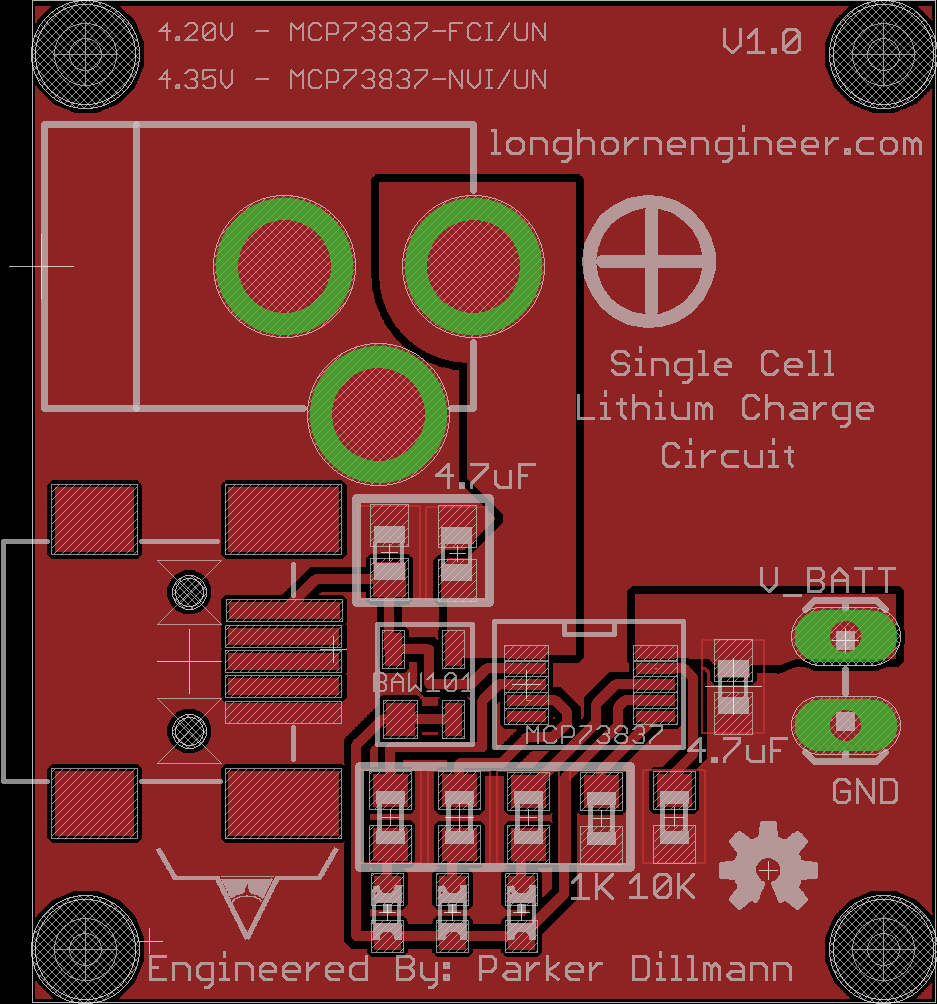
This circuit is designed around the MCP73837 chip. There are a couple different versions of this chip which allows the same PCB have a charge cut off voltage of 4.2V for normal lithium batteries and 4.35V for high capacity lithium batteries.
Here are the eagle files.
PCB V1.0
Schematic V1.0
Taking some suggestions from some members over at Dangerous Prototypes and Abdullah Kahraman I redid part of the Super Boost board to create V1.1. I updated the Super Boost Page to reflect this.
Thanks for the help everyone!
I always wanted to make a portable based of the famous Top Loader Nintendo. For one it is a 100% hardware compatible unlike NOACs (Nintendo On A Chip) and two it would make a whole bunch of Nintendo hardware collectors angry.
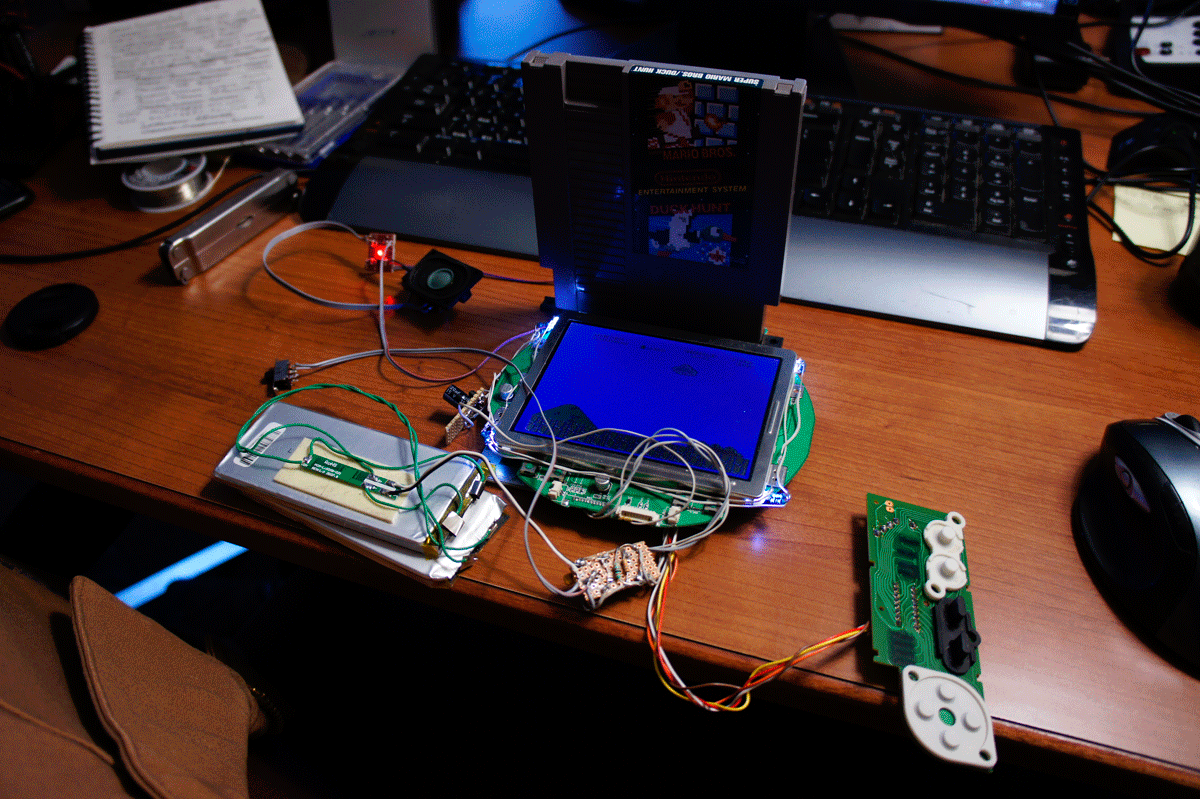
After a bunch of hacking and cutting of the board I got the electronics done. It has 5000mAh of 7.4V lithium power which will run the portable up to 10 hours. The 5″ PSone screen has been hacked to the bare minimum. I removed the 7805’s that power screen and ran the 5V rail off the switcher power supply I made to increase the efficiency. The PSone screen is LED modded as well.
When decided to use a separate sound amplifier as the PSone screen was to greedy on power and did not boost the volume enough. I am using a Sparkfun audio amp that uses the TPA2005D1. This is a very low power audio amp that reproduces sound very cleanly. It is a very efficient audio amp.
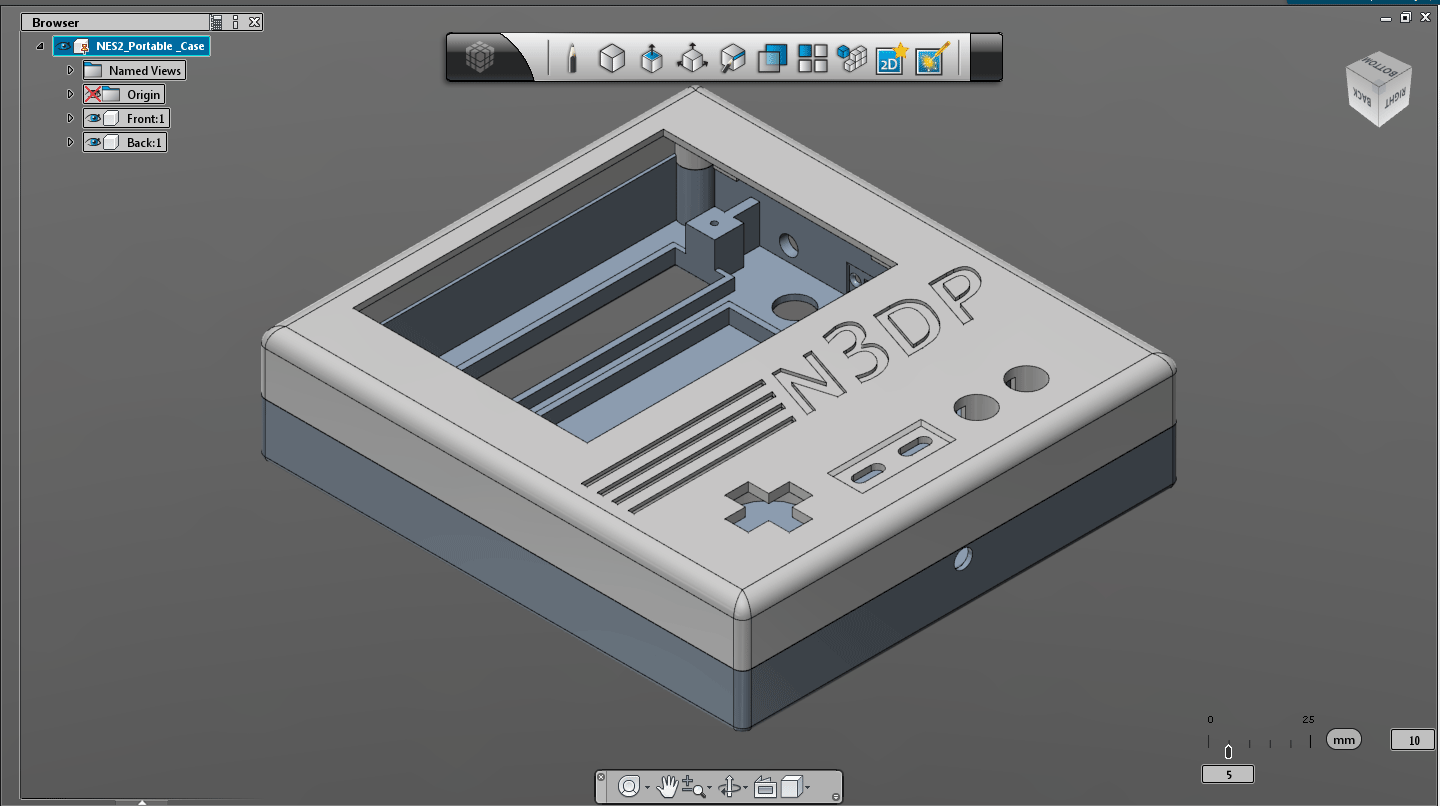

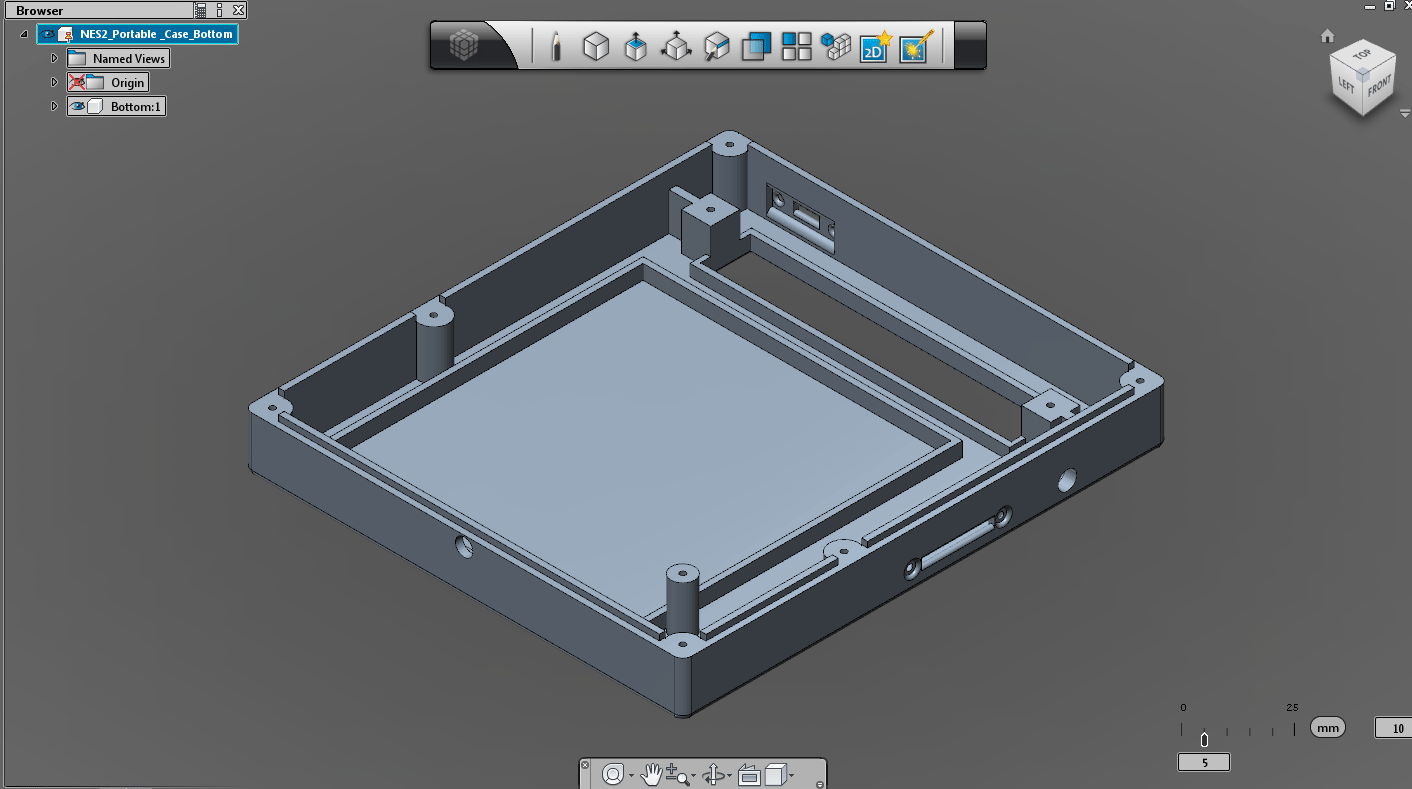
I designed the case in AutoDesk 123D which at the moment is free to download. The case will be 3D printed by my friend Chris Kraft.
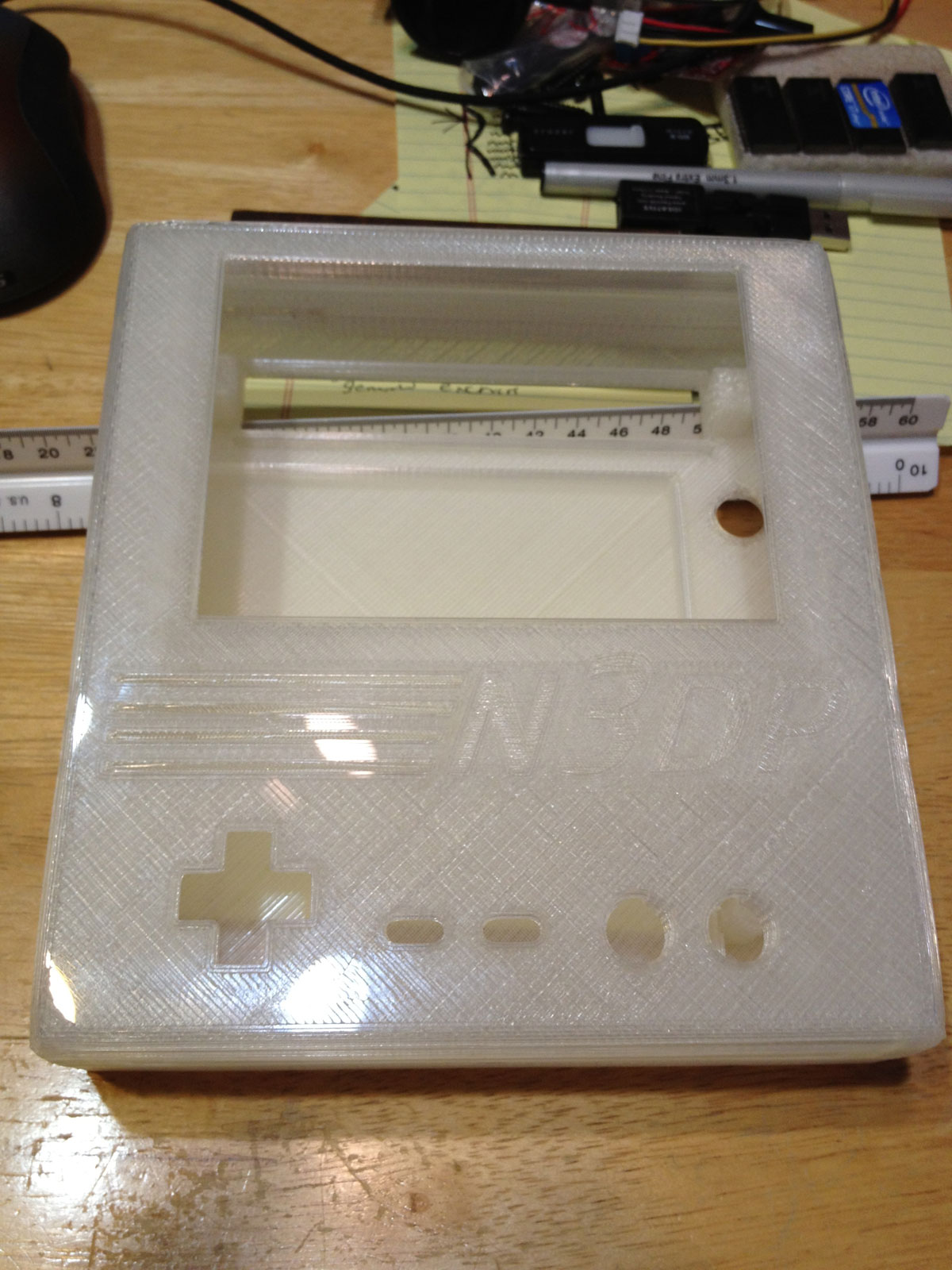
Here is the prototype case right out of the 3D printer.
The prototype case with all the parts inside. I had to make some slight tweaks to the design. The updated 3D files can be downloaded below.
3D Files (Autodesk 123D)
NES2_Portable _Case.123d
NES2_Portable _Case_Top.123d
NES2_Portable_Case_Bottom.123d
NES2_Portable _Case_Bottom_Ver2.123d
NES2_Portable _Case_Top_Ver2.123d
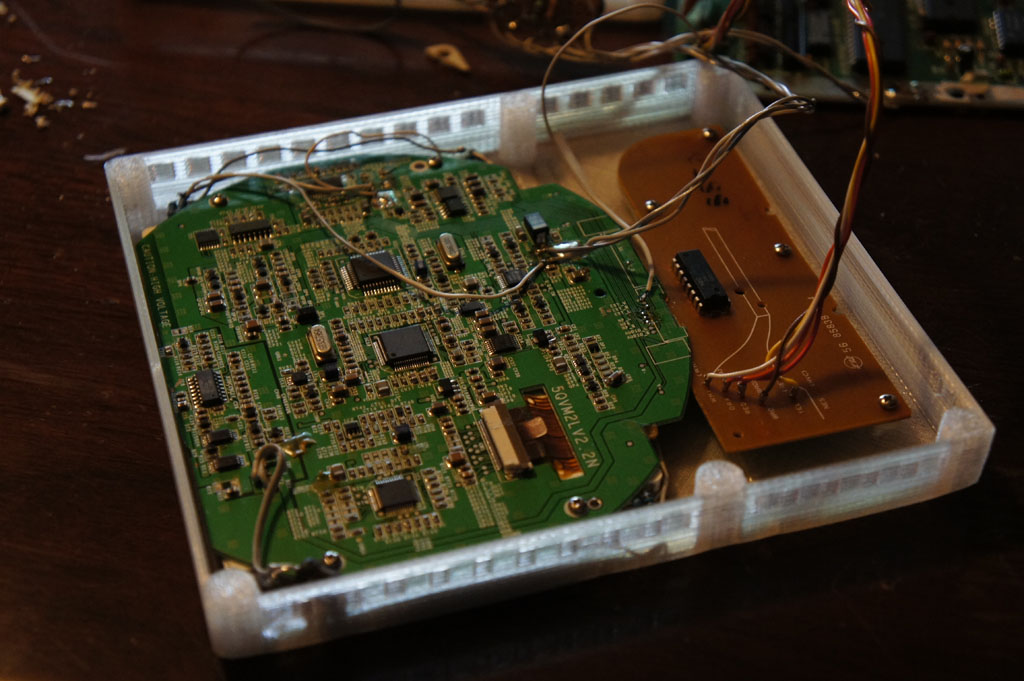
Assembling the front half of the case. Using size M2 sheet metal screws to attach the PCBs to the case. Holes are tapped with a 1.5mm drill bit before hand. for those that know the PSone screen accepts 7.4V then converts it down to 5V in some areas with a 7805 linear regulator. I removed the 7805s and attached my 5V switching power supply to the pads which dropped the power draw of the screen.

The back side houses much more parts. There is no hotglue in this portable. Everything is mechanically held in place. Some electrical tape is used to insulate parts but that is about it.

The button on the right is supposed to be for an internal MCU (like a MSP430) if I ever want to add more functionality to the portable.
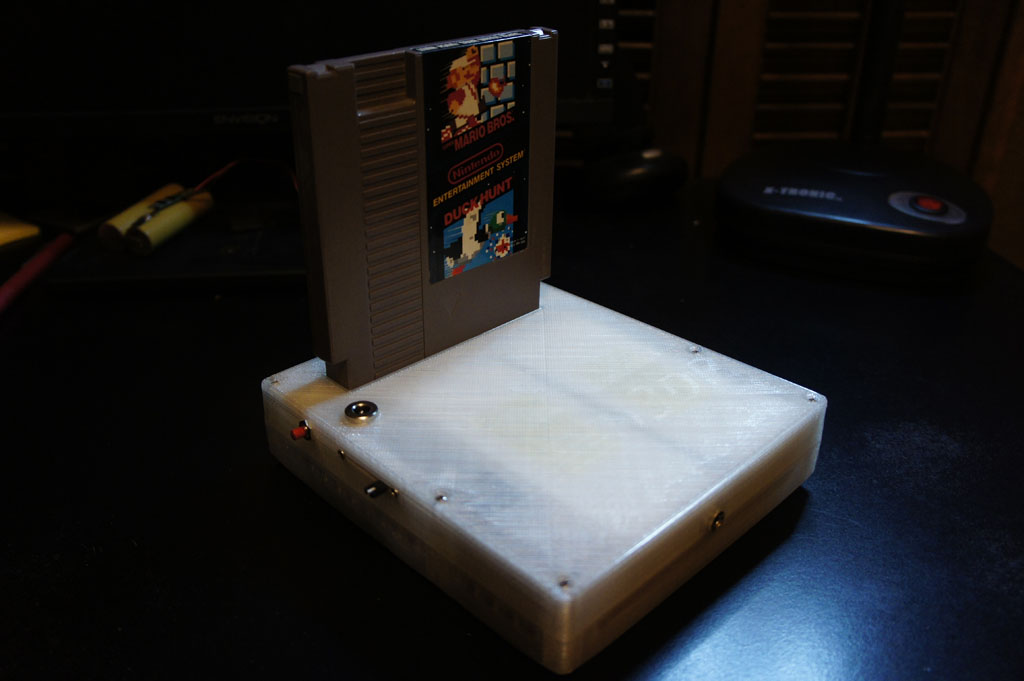
I have some extra space between the front pcb boards and the rear pcb boards inside the case. I will be able to slim off about 1/8″ – 3/16″ off the thickness on the next case.


Like all portrait layout portables the top is a bit top heavy but it still has a good balance because of the thickness of the portable. The controls are laid out in the exact same dimensions as a real NES controller so it feels really nice. It has enough battery power to go for about 10 hours at max volume. I will need to tweak the audio amp a bit however as the volume is a bit soft. Should be able to adjust it by changing two resistors on the SparkFun amplifier board.